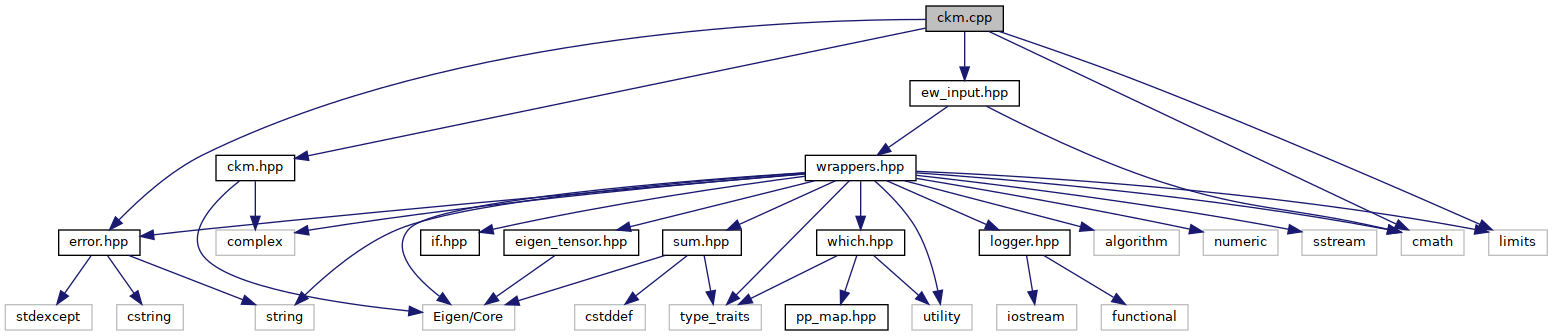
ckm.cpp File Reference
Include dependency graph for ckm.cpp:
 Go to the source code of this file.
Generated on Sun Apr 6 2025 11:10:37 for FlexibleSUSY by |
|||||||||||||||||||||||||||||||||||||||||||||||||
ckm.cpp File Reference
Include dependency graph for ckm.cpp:
Go to the source code of this file.
Generated on Sun Apr 6 2025 11:10:37 for FlexibleSUSY by |
|||||||||||||||||||||||||||||||||||||||||||||||||